 Painel
Painel  Cores
Cores 

Investigadores da Universidade de Illinois, em parceria com a Universidade de Columbia e a Universidade do Texas, nos Estados Unidos, desenvolveram uma técnica que permite aos robôs aprenderem tarefas, simplesmente a verem vídeos de pessoas a executá-las. A equipa criou uma estrutura denominada “Tool-as-Interface”, que utiliza duas câmaras para captar a acção, algo que pode ser feito até com dois smartphones. A partir de dois fotogramas de vídeo, um modelo de visão por computador reconstrói um modelo tridimensional da cena, permitindo ao robô ver a tarefa de diferentes ângulos. O ser humano é então removido digitalmente da cena, isolando apenas a ferramenta e a sua interacção com o ambiente, o que permite que o robô aprenda a trajectória e a orientação exactas da ferramenta, sem tentar imitar directamente os movimentos da mão humana. A abordagem permite a transferência de competências entre robôs com diferentes configurações de braços ou câmaras. Nos testes que envolveram tarefas a exigirem velocidade, precisão e adaptabilidade, como martelar um prego, virar comida numa frigideira, equilibrar uma garrafa de vinho ou chutar uma bola de futebol para a baliza, o método mostrou taxas de sucesso 71% mais elevadas e recolheu dados de treino 77% mais rapidamente do que as técnicas tradicionais de teleoperação. Inspirada na forma como as crianças aprendem observando os adultos, a abordagem enfrenta ainda desafios, como o pressuposto de que a ferramenta está rigidamente ligada à garra do robô. No futuro, a equipa pretende tornar o sistema mais robusto, permitindo que o robô aprenda a utilizar ferramentas de diferentes formas e tamanhos com a mesma eficácia. Fonte: TabNews
Post a comment
Related Posts
20 de Fevereiro, 2026
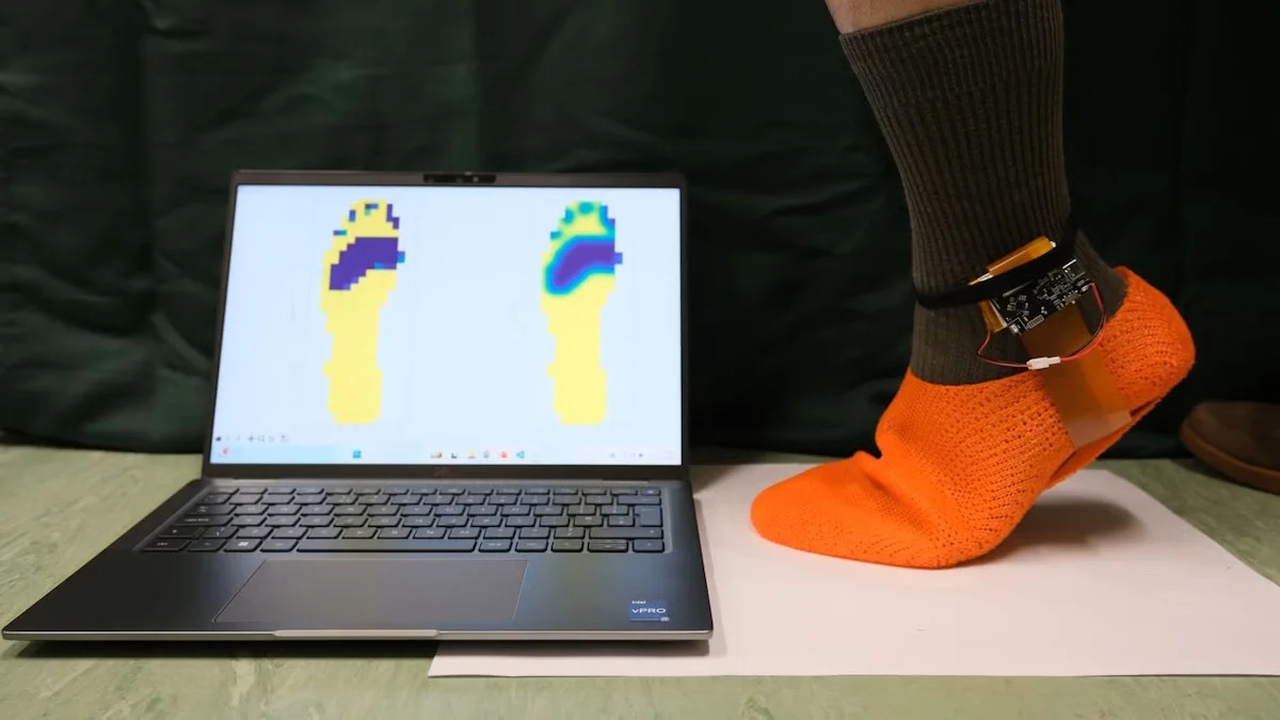
Cientista Cria Palmilha Que Ajuda os Idosos a Prevenirem-se…
O cientista Jiayang Li, docente de engenharia eletrônica na University of Bristol, no Reino Unido,…

20 de Fevereiro, 2026
Há novas imagens a circular dos Galaxy Buds 4
A série de celulares Galaxy S26 certamente será a “estrela” do próximo evento Unpacked da…

20 de Fevereiro, 2026
Vaticano Implementa Tradução em Tempo Real Com Tecnologia de…
A Basílica de São Pedro passou a oferecer um serviço de tradução simultânea, apoiado por…
20 de Fevereiro, 2026
Site do IPMA também foi “abalado” pelo sismo desta…
Os habitantes na área da Grande Lisboa sentiram, ao começo desta tarde desta quinta-feira, dia…




