 Painel
Painel  Cores
Cores 

Uma equipa de investigadores de Hong Kong e do Japão desenvolveu uma nova abordagem para integrar informações visuais e tácteis, permitindo que mãos e braços robóticos manipulem objectos enquanto respondem de forma adaptativa ao ambiente.
Em comparação com os métodos convencionais, normalmente baseados em visão computacional, a nova abordagem, que os investigadores chamam de física multimodal, alcançou taxas de sucesso mais elevadas, um avanço significativo no campo da IA incorporada.
O método aprimorado de IA física foi capaz de manipular objectos com precisão, combinando múltiplas entradas sensoriais para gerar movimentos adaptativos e responsivos. A equipa afirmou que há “possibilidades quase infinitas para aplicações práticas deste tipo de robôs de assistência.”
De acordo com o site Inovação Tecnológica, a machine learning tem sido utilizada para apoiar a Inteligência Artificial na aprendizagem de padrões de movimento humanos, permitindo que os robôs realizem tarefas comuns de forma autónoma. Estes sistemas dependem principalmente de informações visuais e carecem dos julgamentos tácteis que os seres humanos fazem sem pensar, como distinguir a textura dos materiais, a frente e o verso dos objectos ou se estão a segurar a parte quente de uma chávena de café.
“Para superar essas limitações, desenvolvemos um sistema que também permite decisões operacionais com base na textura dos objectos-alvo, que são difíceis de avaliar apenas com base em informações visuais”, explicou o professor Mitsuhiro Hayashibe, da Universidade de Tohoku. “Esta conquista representa um passo importante para a realização de uma IA física multimodal que integra e processa vários sentidos, como visão, audição e tacto, assim como nós fazemos.”
Em vez de chávenas de café, a equipa utilizou como ambiente de teste o facto de ser muito mais fácil identificar a parte da frente e de trás do velcro ao tocá-lo do que ao discernir a sua aparência, como os sistemas de visão artificial tentam fazer. O sistema robótico de visão e toque integra um sensor táctil para capturar informações de textura detalhadas, que são então utilizadas para apoiar a visualização em tempo real por câmaras. Isto permite-lhe lidar com tarefas relacionadas com textura que os métodos baseados em câmaras não conseguem realizar.
Usando o novo sistema, o robô de teste foi capaz de realizar operações bimanuais mesmo em tarefas em que as diferenças entre a frente e o verso e a aderência dos objectos manuseados são cruciais, como no caso do velcro e do fecho e abertura de zíperes.
Post a comment
Related Posts
20 de Fevereiro, 2026
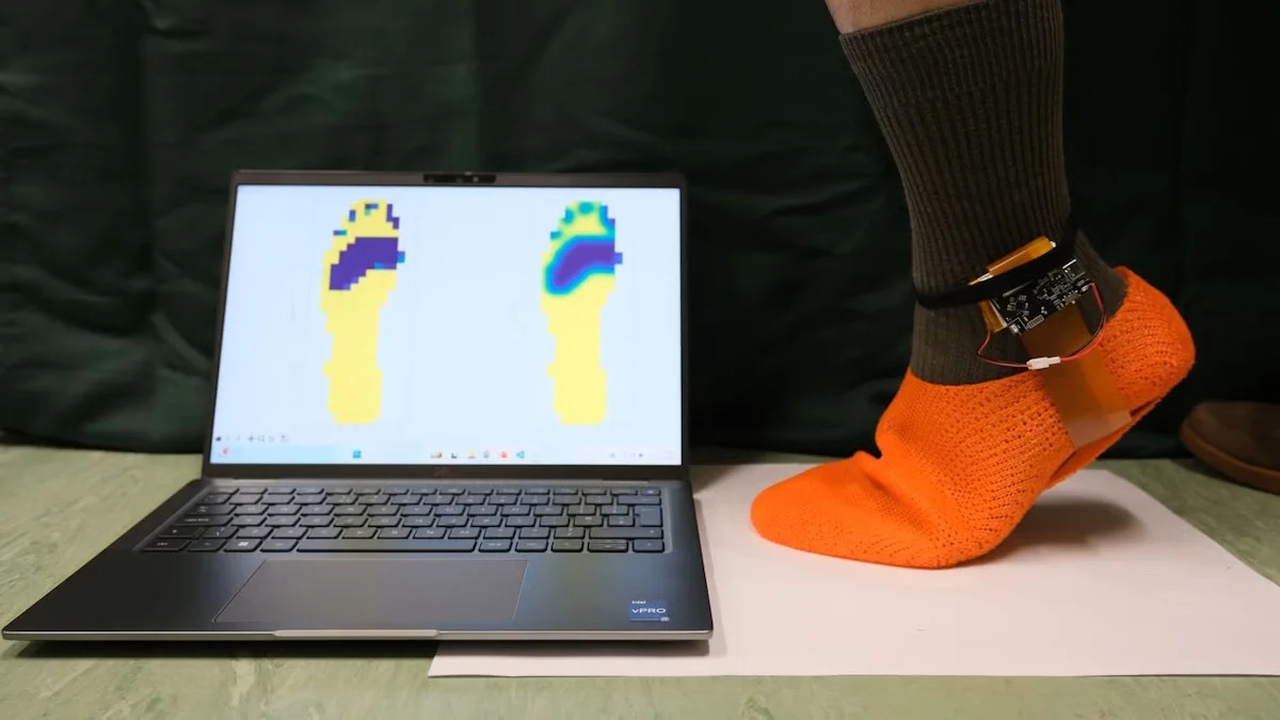
Cientista Cria Palmilha Que Ajuda os Idosos a Prevenirem-se…
O cientista Jiayang Li, docente de engenharia eletrônica na University of Bristol, no Reino Unido,…

20 de Fevereiro, 2026
Há novas imagens a circular dos Galaxy Buds 4
A série de celulares Galaxy S26 certamente será a “estrela” do próximo evento Unpacked da…

20 de Fevereiro, 2026
Vaticano Implementa Tradução em Tempo Real Com Tecnologia de…
A Basílica de São Pedro passou a oferecer um serviço de tradução simultânea, apoiado por…
20 de Fevereiro, 2026
Site do IPMA também foi “abalado” pelo sismo desta…
Os habitantes na área da Grande Lisboa sentiram, ao começo desta tarde desta quinta-feira, dia…




