 Painel
Painel  Cores
Cores 

Cientistas da Universidade Northwestern, nos Estados Unidos, construíram uma perna humanóide completa em tamanho real, incluindo “ossos” de plástico rígido, tendões elásticos e até mesmo um sensor que permite que a prótese biónica sinta os seus movimentos.
A perna utiliza três músculos artificiais – um quadríceps, um posterior da coxa e uma panturrilha – para flexionar as articulações do joelho e do tornozelo. Os músculos são flexíveis o suficiente para absorver impacto, mas com capacidade para aplicar força e movimento suficientes para chutar uma bola.
“É difícil fazer robôs sem conformidade física responderem ou adaptarem-se suavemente a mudanças externas e interagirem com segurança com os seres humanos”, afirmou Taekyoung Kim. “Para que os robôs do futuro se movam de forma mais natural e segura em ambientes não estruturados, precisamos de projectá-los mais como corpos humanos – com esqueletos rígidos e actuadores macios, semelhantes a músculos.”
Os actuadores macios, com propriedades mecânicas semelhantes às dos músculos, têm sido alvo de grande interesse, pois permitem a construção de equipamentos mais leves, com menor consumo de energia , o que é mais compatível não só com a coexistência com os humanos, mas também com a integração no corpo humano.
A abordagem utilizada pela equipa emprega um actuador cilíndrico impresso em 3D, uma estrutura chamada “auxética de cisalhamento manual”, que permite movimentos e propriedades únicas, como estender-se e expandir-se quando torcida. O movimento de torção necessário para mover a estrutura pode ser gerado por um pequeno motor eléctrico integrado.
Taekyoung Kim desenvolveu um método de impressão 3D dessas estruturas, usando uma borracha comum e barata, frequentemente usada em capas de telemóveis. O material foi então utilizado para construir uma estrutura em formato de fole, que permite que o motor rotativo accione a extensão e a contracção dos actuadores.
“Ao desenvolver novos materiais para robótica com o desempenho e as propriedades dos sistemas musculoesqueléticos biológicos, podemos construir robôs mais resistentes e robustos para uso no mundo real”, referiu o professor Ryan Truby
Esses actuadores empurram e puxam com uma força impressionante, agindo como músculos artificiais. O músculo pode até endurecer dinamicamente quando activado, assim como um músculo humano. Esta foi uma melhoria substancial em relação aos protótipos anteriores da equipa, que tem vindo a trabalhar em músculos artificiais para robôs há vários anos.
Para demonstrar o potencial real do músculo, a equipa usou impressão 3D para imitar os ossos da perna usando plástico rígido. Conectores inspirados em tendões, feitos de borracha, ligam os músculos quadríceps e isquiotibiais da canela e o músculo da panturrilha à estrutura do pé. Os tendões e músculos ajudaram a amortecer os movimentos e a absorver os choques, de forma semelhante a um sistema musculoesquelético biológico.
Cada conjunto musculoesquelético pesa aproximadamente o mesmo que uma bola de futebol e é ligeiramente maior do que uma lata de refrigerante. Pode esticar até 30% do seu comprimento e levantar objectos 17 vezes mais pesados do que a própria perna.
De acordo com o site Inovação Tecnológica, o mais importante para a sua utilização em corpos robóticos e próteses é o facto de o músculo poder ser alimentado por uma bateria, eliminando a necessidade de equipamento externo pesado.
“Ao desenvolver novos materiais para robótica com o desempenho e as propriedades dos sistemas musculoesqueléticos biológicos, podemos construir robôs mais resistentes e robustos para uso no mundo real”, referiu o professor Ryan Truby. “Estamos entusiasmados para ver como esses músculos artificiais podem impulsionar novos rumos para robôs humanóides e semelhantes a animais.”
Post a comment
Related Posts
20 de Fevereiro, 2026
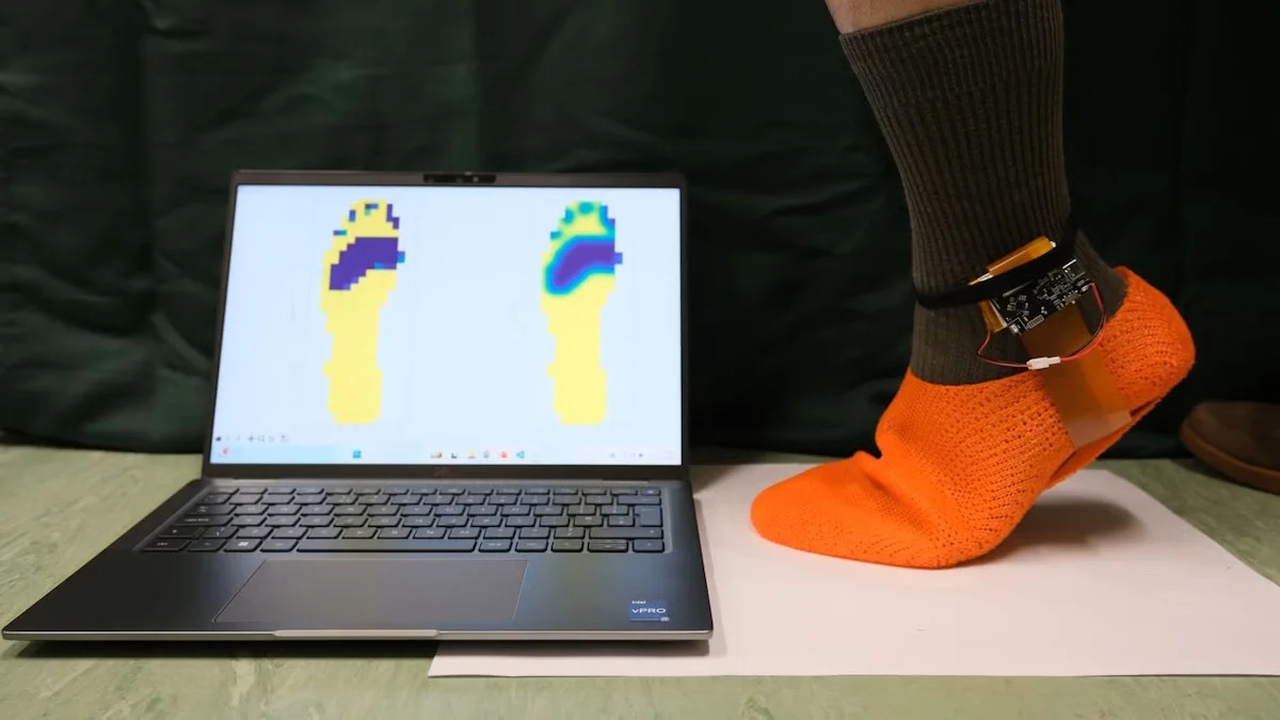
Cientista Cria Palmilha Que Ajuda os Idosos a Prevenirem-se…
O cientista Jiayang Li, docente de engenharia eletrônica na University of Bristol, no Reino Unido,…

20 de Fevereiro, 2026
Há novas imagens a circular dos Galaxy Buds 4
A série de celulares Galaxy S26 certamente será a “estrela” do próximo evento Unpacked da…

20 de Fevereiro, 2026
Vaticano Implementa Tradução em Tempo Real Com Tecnologia de…
A Basílica de São Pedro passou a oferecer um serviço de tradução simultânea, apoiado por…
20 de Fevereiro, 2026
Site do IPMA também foi “abalado” pelo sismo desta…
Os habitantes na área da Grande Lisboa sentiram, ao começo desta tarde desta quinta-feira, dia…




